Доступна прошивка №215 от 24.06.2025
Пследнее: Исправлена ошибка разнонаправленности действия кнопок в кнопочной консоли для катера
Пследнее: Исправлена ошибка выполнения автоматической калибровки потенциометра рулевого актуатора.
- Добавлена возможность изменения названия и пароля внешней WIFI сети и пароля. По умолчанию это имя LAN2 с паролем 12345678. Теперь вы можете изменить их и подключаться к другим сетям для обновления прошивки и реализации других возможностей.
- Обнаружены WIFI эхолоты Erchang F68, которые отображаются в сетевом окружении телефона как сеть с названием, начинающимся с BONDA_xxxxx. С 183 прошивки автопилот будет признавать в этой сети эхолот Erchang F68
- Исправлено — Не восстанавливались состояния 1-4 бункеров во время восстановления настроек из файла с телефона.
обновлено 10.06.25
- Можно задать радиус точки отличный от используемого по умолчанию для процесса сканирования водоема.
- Обновлен алгоритм сканирования водоема в отношении петель.
- Базовые тесты на воде пройдены успешно.
обновлено 11.06.25-12.06.25
- Для пультов TX16S «крутилки» VRA/VRB регулировали скорость завоза/возврата в авто режимах. В ожидания запуска миссии, это скорость завоза/возврата и яркость фар/габаритов в режиме работающего автопилота (на миссии). Это часто приводило к ошибочным (случайным) изменениям скоростей завоза и/или возврата. Для того чтобы отключить это выберите в меню «OpenTX пульты» корректную «Модель вашего пульта«. Для TX16S (в котором есть другие крутилки) эта функция изменения скоростей через VRA/VRB отключиться и не будет вам мешать а «крутилки» VRA/VRB будут регулировать яркость фар и светодиодом и в режиме ожидания. Для других пультов EdgeTX все остается как и ранее. (Изменение в пультах не требуется, только прошивка автопилота на версию >= 183). (УСТАРЕЛО, КРУТИЛКИ ОСВОБОЖДЕНЫ ОТ ФУНКЦИИ СВЕТА .. СМ.НИЖЕ)
- Для всех типов пультов «вернулся» режим БЫСТРОЙ ОТПРАВКИ НА РАБОЧУЮ ИЛИ ДОМАШНЮЮ ТОЧКУ из ручного режима
- Для всех пультов в ручном режиме наклон ЛЕВОГО джойстика ВЛЕВО или ВПРАВО теперь приведет к остановке двигателя. Можно использовать как временно экстренное торможение. Отклонения «шифта» в ручном режиме более не будут вызывать случайное срабатывание мотора.
- Тримами T3 и T2 на TX16S (и trim-thr и trim-ali на других пультах) теперь урегулируется скорость завоза и возврата соответственно. В админке с настройках теперь видно какое измененное от настроек по умолчанию значение в данный момент (оно рядом с этими полями). После перезапуска автопилота, как и раньше, значения восстанавливаются на те что внесены в админке.
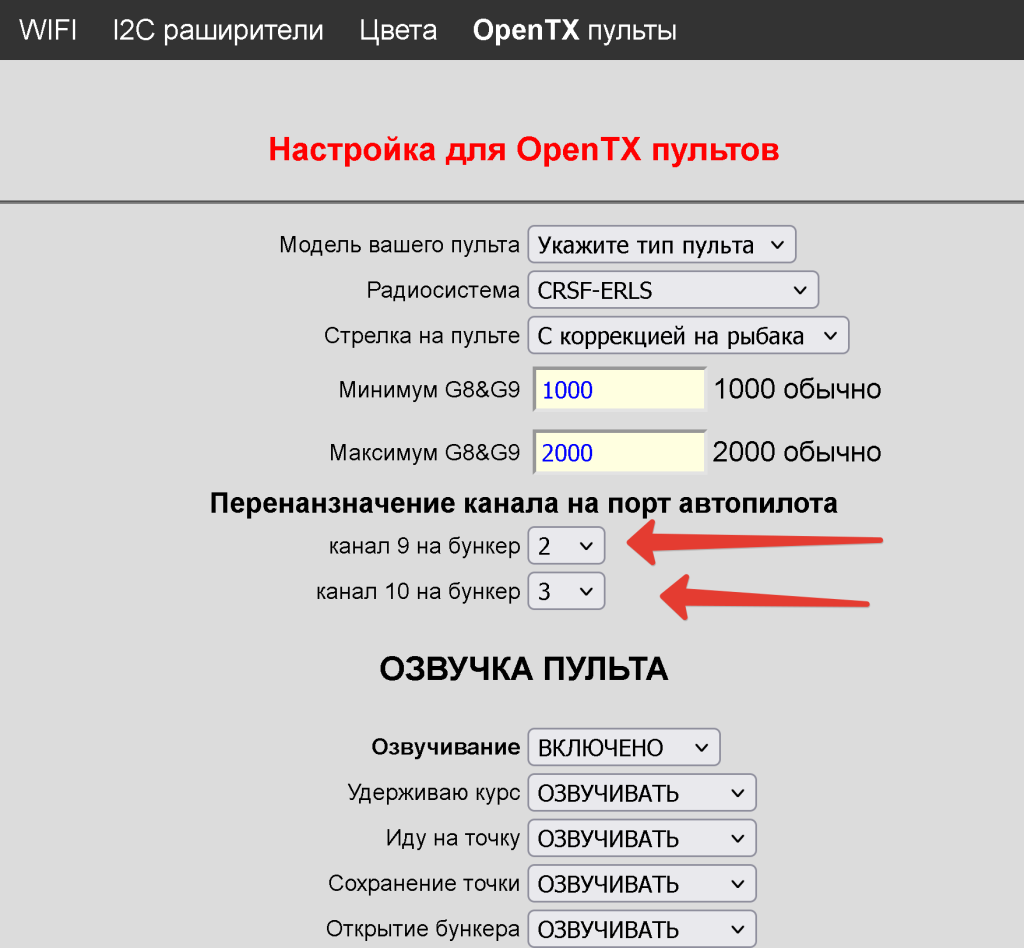
- Яркость фар в EdgeTX пультах теперь регулируется Тримами T5 и T6 (в TX16S). Тем самым освобождены полноценные скоростные каналы для управления дополнительным предположительно поворотным оборудованием. Это каналы 9 и 10 (на которых стоят сейчас крутилки S1 и S2). Будем использовать их с большей пользой для своих индивидуальных целей…типа поворота камер, фонарей, лебедок и других важных железок. Так же дынные каналы могут быть задействован для управления типами судов позволявших технически плавать «боком«. В настройках «OpenTX пульты» на днях появится на какие порты автопилота перенаправлять полученные из этих каналов значения. Двух PWM устройств пока должно хватить.
- Добавлена возможность редиректа каналов любого EdgeTX пульта на любой бункер автопилота (с первого по 24). Работает в любом режиме. Не отменяет стандартный функционал выбранных бункеров, только добавляет функционал.
обновлено 14.06.25
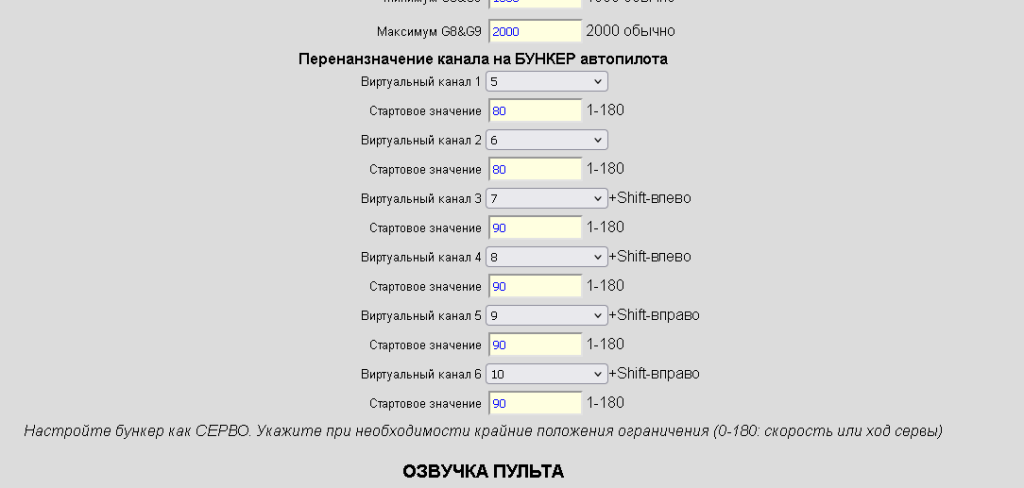
- Расширены возможности подключения нестандартного оборудования. Вместо двух теперь возможно управление 6 устройствами. Выбор ПАР каналов выбирается Шифтом (это правый джойстик ВЛЕВО или ВПРАВО). Так как назначение устройств может быть очень разнообразным, можно указать значение, которое будет установлен при старте. По умолчанию 90 градусов (1500us).
- Исправлены недочеты в работе расширителя портов. Некоторые улучшения в редакторе портов и в таблице.
обновлено 15.06.25
- Увеличена производительность трансляции с видеокамер ESP32CAM в админку автопилота. Уменьшены «фризы», изображение стабильно задержки практически не наблюдается.
- Добавлены ПЯТЬ дополнительных каналов обновлений. Теперь есть пять дополнительных каналов которые доступны для всех. Это: Альфа, Еженочная, Тест-6, Тест-7, Тест-8. Канал Тестовый был Переименован в СОВРЕМЕННАЯ, «Стабильная» с 161 прошивкой переименован с «Старая«. Бывший канал обновлений «Новые возможности» с 171 прошивкой переименован в «Стабильную«. Если вы не меняете канал в настройках, то ничего не произойдет. Каналы просто изменили названия. Новые каналы появятся только после обновления на 183 прошивку. На канал Альфа, будут выкладываться более менее проверенные на воде версии. На канал «Еженочная» (Nigthly) будет выкладываться прошивка со стола разработчика, которая вполне может содержать ошибки в том числе и критические. Её не рекомендую скачивать, она может быть вообще не проверенной. Каналы Тест-6,7,8 запасные каналы для различных рабочих моментов с пользователями и тестировщиками, т.е. для тестов каких то частных случаев. Их тоже не рекомендую устанавливать без предварительной договоренности и понимания что там вообще есть. В скором времени, после тестирования на воде я выложу прошивку 183 на канал СОВРЕМЕННАЯ (это у вас тестовый) обновитесь на нее и после сможете выбирать новый канал.
обновлено 16.06.25
- Добавлена возможность включать и выключать возможность запуска WEBRC — управление корабликом из админки. Ява скрипты для этого дополнения занимают много места на карте автопилота и не всем оно необходимо. Теперь можно его отключить из Настройки-Доп2. Если это сделать, после перезапуска не нужные файлы будут автоматически удалены и освободиться около 40 килобайт места.
- Исправлена проблема с запуском мастера быстрой настройки автопилота — был белый экран.
обновлено 18.06.25
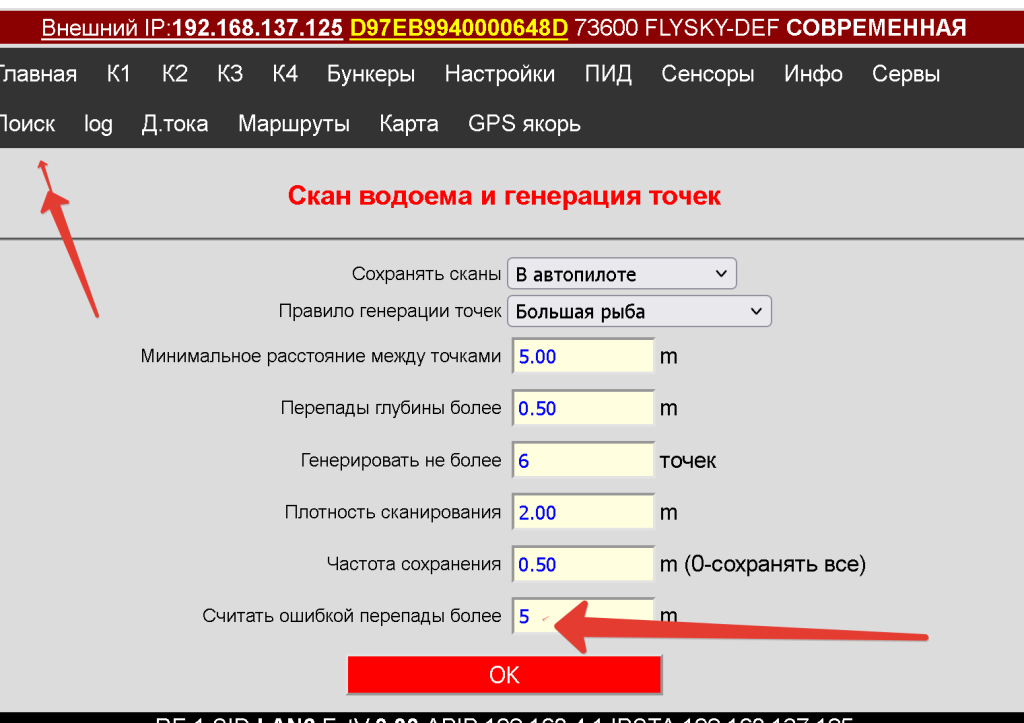
- В закладке поиск появилась настройка, разницу какой глубины между последовательными посылками эхолота надо считать помехой (5 метров по умолчанию). К примеру была глубина 2 метра и сразу с эхолота идут показания 8 метров или 20 метров. На графике это не отобразится. Но если аномальные посылки продолжают поступать в течении ОДНОЙ секунды, то мы будем уже выводить эти данные не смотря на аномальную разницу. Может это действительно яма. Настройка касается всех поддерживаемых автопилотом UNIBOAT эхолотов и глубиномеров. 0 — в настройке отключит фильтр. Как покажет себя на воде будет видно на след. тестах
обновлено 19.06.25
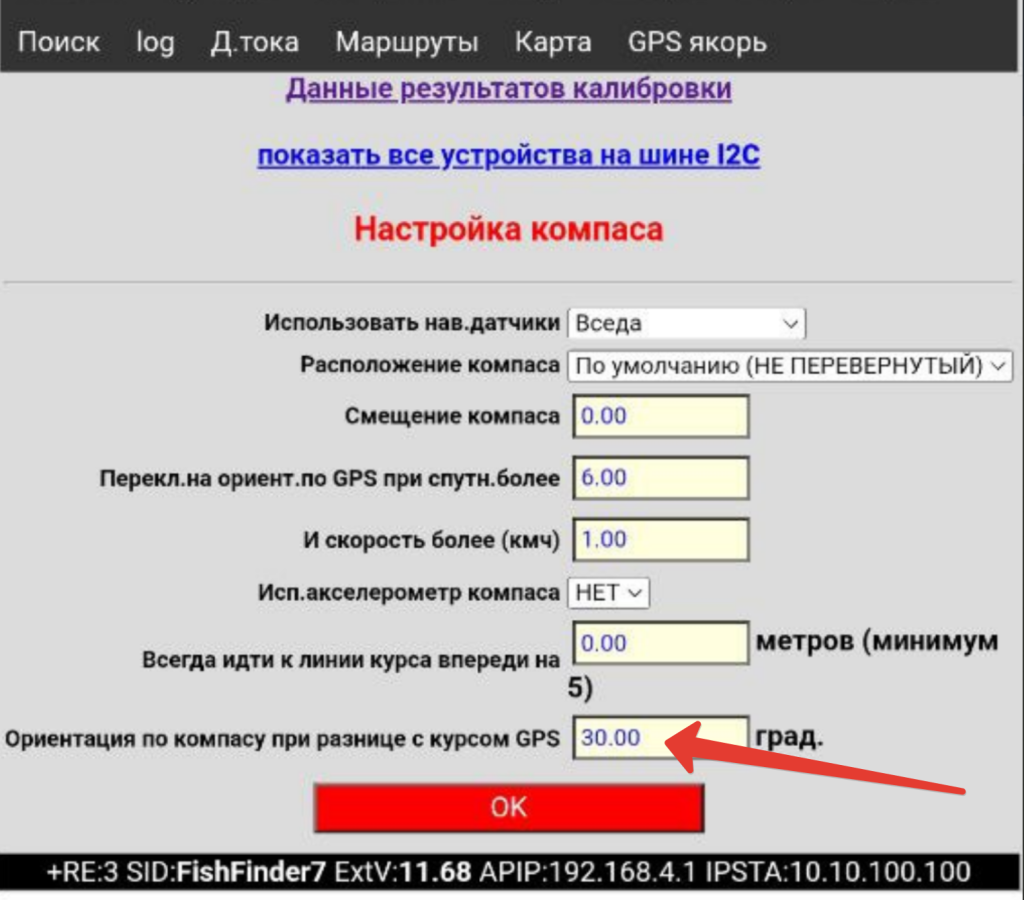
- Добавлена настройка в закладке сенсоры. Касается важного аспекта, выбора более актуальных показаний направления движения и использования их для навигации. Теперь в настройках можно указать угол между показаниями магнитного компаса и курса от модуля GPS при превышении которого для навигации будут использоваться показания не с GPS, а с магнитного компаса. Внимание! Компас должен быть хоть как то откалиброван. GPS модуль некоторым с запаздыванием выдает показания курса при повороте и выдает практически рандомные значения при очень низких скоростях. Скорость он иногда может тоже выдавать не очень точно и не очень сразу. А по скорости мы раньше и переключались. Компас, хоть и может не очень точно показывать все направления света, но зато выдает эти данные правильно в пределах своей точности и быстро при любых условиях и скоростях. И это очень хорошо. Если есть большая разница в его показаниях и курса с GPS модуля (которая перекрывает погрешность вашего компаса), то точно врет GPS курс и мы будем сразу используем компас пока ситуация не поменяется. Если разница показаний не превышает угол который мы ввели в настройках (30 градусов) то у автопилота нет причин не доверять GPS и он будет использовать курс который идет с GPS т.к. он не магнитный, а вычисляется математически и не имеет погрешности т.е. абсолютно точен и он лучше чем не очень точный компас. Автопилоту теперь может более правильно выбирать момент когда можно доверять курсу GPS, а когда нет. Если поставить угол 0 то данная возможность будет не задействована. Чем хуже откалиброван ваш компас, тем больше надо ставить угол. Это угол на который потенциально может может «врать» ваш компас. Для себя я прикинул, что не более 30 градусов примерно. Учтите что все старые настройки не потеряли своей актуальности а работают так же. Теперь у автопилота появился просто еще один повод понять что надо использовать магнитный компас. Ну и можем теперь поставить скорость переключения в 1 кмч. В общем скриншот ниже. Лучше поставить как на нем.
- На скоростных корабликах можно столкнуться с трудностями подстройки ПИД регулятора. Физические свойства системы значительно меняются при увеличении скорости. На малых скоростях кораблик может очень плохо рулить (особенно если руль расположен далеко от винта). На большой скорости увеличивается отзывчивость системы и с ПИДами настроенными на маленькой скорости может появиться к «виляние». Возможен и обратный эффект. Эту проблему можно решить более точной подстройкой ПИД. Для таких случаев в автопилотах MAX-I и MAX-II теперь предусмотрена функция адаптации ПИД регулятора поворота к скорости кораблика. На странице ПИД, самое первое поле это коэффициент адаптации к скорости. 0.3 — по умолчанию. Опция позволяет автоматически увеличивать значения ПИД при увеличении скорости кораблика. Увидеть скорректированные значения пид можно в этой же закладке (вверху) если обновить страницу админки. Тесты на воде показали эффективность метода. Проводились тесты на кораблике microboat-sedna скорость 24кмч — очень отзывчивое рулевое управление, ранее были трудности в настройке пид. Скоро постараюсь снять тест на этом кораблике при свете дня, со сравнительными значениями. (MAX1&MAX2)
- Изменена функция сброса ошибок пид при выходе на прямой курс. Ранее ошибки сбрасывались только до определенного расстояния от точки старта (настрока — 10 метров def). Теперь, если указать расстояние — 0, то при переходе из зоны большого отклонения от курса в зону прямого хода (допустимый угол указывается рядом с полями ПИД поворота) будет произведен сброс накопленных ошибок ПИД и кораблик поплывет по курсу как будто его только что запустили на миссию.
- Исправлена ошибка разнонаправленности действия кнопок в кнопочной консоли для катера